大型模擬仿真多通道虛擬現實系統
大型模擬仿真多通道虛擬現實系統

簡介
虛擬現實系統開發的重點是給用戶帶來沉浸感,通過提供立體可視化將用戶置身于一個虛擬環境中,但由于一些程序中用戶與虛擬環境的交互沒有完整的觸覺反饋系統,只強調視覺上的感知,缺乏用戶與虛擬環境的交互功能,結果達不到用戶的操作預期,由于這種缺陷用戶需要不斷地訓練、學習沒有觸覺反饋情況下的操作。
?
?
目前一個大型虛擬現實系統的不僅要有視覺上的沉浸感,還要有觸覺上的反饋,這樣虛擬環境中所有必要的交互控制信息就可以被創建出來,此外,在大規模并行計算機系統的支持下,視覺和觸覺上復雜的物理現象可以實時的模擬出來,
系統架構
如圖2,系統結果分為四個組件類型,系統的主要組件是計算單元,此組件負責處理來自輸入設備的數據,還負責將坐標信息傳到給其他組件,如所需的復雜場景模擬數據以及分布式高負載觸覺交互信息,因此,計算組件被分成三個子組件分別執行不同的物理模擬任務,中央單元是控制整個數據流高性能工作站,另外兩個組件HPC和GPU集群協助工作站出來高負載計算數據。
?
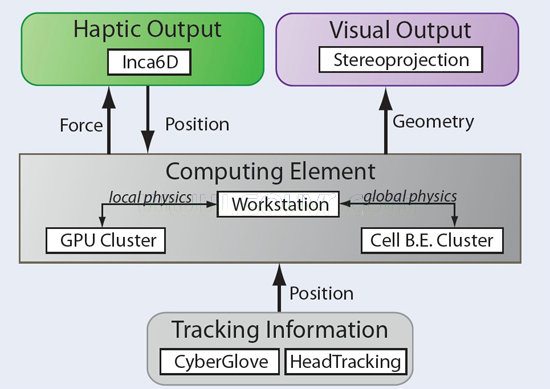
圖2
?
觸覺裝置
?

圖3
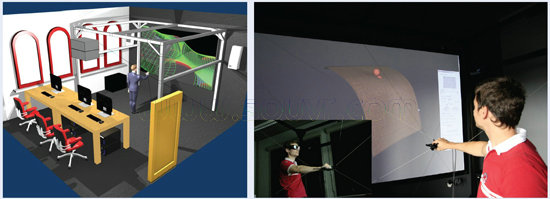
我們使用六自由度的Inca6D力反饋設備,它非常適合用于創建大型虛擬環境,通過一個被稱為末端執行器的裝置將力和扭矩傳給用戶,這個設備附屬于一個由鋼纜組成的滑輪系統,可以在不同的末端執行器之間交互基于仿真的需求。末端執行器的鋼纜由支撐框架8個角落的馬達控制,在我們的設置中,我們使用的HAPTION末端執行器非常適合我們的需求,末端執行器可以抓取虛擬目標,另一個可能的設置如圖4(左)所示,將末端執行器作為一個腕帶使用,系統可以和數據手套(Cyberglove)圖4(右)一塊使用,從而可以完成完整的抓取動作,在這種情況下INCA對手腕施加反饋力,結合數據手套可以接觸控制一個完整的手部模型。
?

圖4
?
系統使用很細的鋼纜,其對投影的影響降很最低,這是非常重要的,在我們的案例中,由于空間限制不能采用背投(用于可視化),在我們當前的設置中平均身高1.8米的用戶在其中工作,幾乎沒有任何阻礙。如圖1右側所示。
 打印本文
打印本文 關閉窗口
關閉窗口